PERCOBAAN 6
1. Prosedur[Kembali]
- 1. Rangkai semua komponen sesuai dengan percobaan pada modul
- 2. Buat program untuk STM32 di STM32CubeIDE, sesuaikan konfigurasinya dengan rangkaian pada proteus dan kondisi yang dipakai
- 3. Upload program ke STM32
- 4. Jalankan rangkaian




3. Rangkaian Simulasi dan Prinsip Kerja[Kembali]

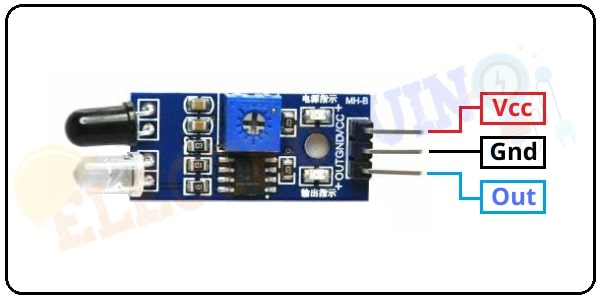
Rangkaian ini menggunakan mikrokontroler STM32F103C8T6 sebagai unit pemrosesan utama yang menerima input dari sensor inframerah dan tombol push-button, kemudian mengontrol LED dan buzzer sebagai output. Sensor inframerah berfungsi sebagai pendeteksi objek berdasarkan pantulan sinar inframerah, sementara tombol digunakan sebagai input manual.
Prinsip kerja rangkaian ini adalah sebagai berikut: saat tombol ditekan, mikrokontroler membaca statusnya melalui port GPIOB dan mengaktifkan LED merah serta buzzer sebagai indikasi. Jika sensor inframerah mendeteksi adanya objek, maka mikrokontroler akan menyalakan LED hijau dan buzzer sebagai alarm. Program dalam STM32F103C8T6 membaca status tombol dan sensor secara terus-menerus dalam loop utama, dengan jeda waktu sebesar 100 milidetik untuk menghindari pembacaan berulang yang tidak diinginkan.
Dalam programnya, HAL_GPIO_ReadPin(GPIOB, BUTTON_Pin) digunakan untuk membaca status tombol, dan HAL_GPIO_ReadPin(GPIOB, IR_Pin) untuk membaca status sensor inframerah. Ketika kondisi yang sesuai terpenuhi, HAL_GPIO_WritePin(GPIOA, RED_Pin | GREEN_Pin | BUZZER_Pin, GPIO_PIN_SET) digunakan untuk menyalakan LED dan buzzer. Jika tidak ada aktivitas dari tombol maupun sensor, maka semua output akan dimatikan dengan GPIO_PIN_RESET.

Pin.value() (MicroPython) atau fungsi C- STM32 (HAL C):
- Raspberry Pi Pico (MicroPython):
- STM32 (HAL C):
- Raspberry Pi Pico (MicroPython):




Tidak ada komentar:
Posting Komentar